




SHARE


Vol. 58 No. 1 (2021) 新製品·新技術特集
技術論文
|
||||||||||||
製品・技術
- 製品情報
- 技術情報
- 01 今日を支える CARBON NEUTRAL WORLD
- 02 未来を創る INNOVATION
- 03 想いを叶える MHI CORE TECHNOLOGIES
- 04 技術を高める R&D CENTER, FACILITY
- 三菱重工技報
- Vol. 61 No. 2 プラント·インフラドメイン特集
- Vol. 61 No. 1 新製品·新技術特集
- Vol. 60 No. 4 サービス技術特集
- Vol. 60 No. 3 エナジードメイン特集
- Vol. 60 No. 2 物流·冷熱·ドライブシステムドメイン特集
- Vol. 60 No. 1 新製品·新技術特集
- Vol. 59 No. 4 カーボンニュートラル特集
- Vol. 59 No. 3 デジタルイノベーション特集
- Vol. 59 No. 2 プラント·インフラ特集
- Vol. 59 No. 1 新製品·新技術特集
- Vol. 58 No. 4 航空宇宙特集
- Vol. 58 No. 3 三菱パワー特集
- Vol. 58 No. 2 物流·冷熱·ドライブシステムドメイン特集
- Vol. 58 No. 1 新製品·新技術特集
- MHI FUTURE STREAMが描き出す当社グループの方向性
- 新たな共創の場を通じた"Hardtech"イノベーションへの挑戦
- 複雑形状複合材部品の低コストかつ高品質な多層一体成形技術
- 製品の摩擦損失低減·効率向上を実現する低摩擦表面処理を用いたしゅう動面改良技術
- 数値解析技術へのベイズ最適化適用による設計高度化
- 1650°C級JAC形ガスタービンを中核とする第二T地点実証発電設備での検証結果
- 世界最高温度1650°C級JAC形ガスタービン向け先進遮熱コーティングの開発
- 火力発電プラント水処理の現状と新技術
(脱ヒドラジン,JIS改正,水質診断) - 蒸気タービン保全における複雑形状翼溝部の高効率·高精度超音波探傷技術
- 火力発電プラントのリサイクル資源を有効利用する脱硝触媒の再生技術
- 高効率ガスタービンの安定運転を実現する振動抑制技術·予兆検知技術の開発
- 電源運用シミュレーション技術を活用した発電設備の定量価値評価
- ごみ焼却施設最適運営のためのAI遠隔監視·運転支援システム MaiDAS®(マイダス)
- AUVの低速·低高度制御
- 深層学習における予測結果の確からしさ評価技術
- 複数の無人ビークル協調作業のための群知能技術の開発
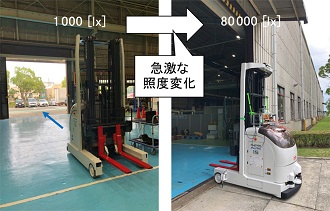
- 照明条件変動にロバストな高精度自己位置推定技術
- 次期主力熱間圧延機 第4世代PCミル
- 点検·整備の省人化でDX化推進 - - 重イオン用超伝導加速管製造技術
- 世界初の段ボール段山不良画像検査装置の開発
- 高出力レーザを用いたコンクリート建屋解体技術の開発
- 回転機械のフレキシブルな運用を支援するバーチャル計測技術
- Vol. 57 No. 4 原子力特集
- Vol. 57 No. 3 工作機械特集
- Vol. 57 No. 2 インダストリー&社会基盤特集
- Vol. 57 No. 1 新製品·新技術特集
- Vol. 56 No. 4 冷熱特集
- Vol. 56 No. 3 三菱日立パワーシステムズ特集
- Vol. 56 No. 2 M-FET特集
- Vol. 56 No. 1 新製品·新技術特集
- Vol. 55 No. 4 パワードメイン 新事業特集
- Vol. 55 No. 3 インダストリー&社会基盤ドメイン特集
- Vol. 55 No. 2 新技術特集
- Vol. 55 No. 1 環境特集
- Vol. 54 No. 4 航空宇宙特集
- Vol. 54 No. 3 三菱日立パワーシステムズ特集
- Vol. 54 No. 2 冷熱特集
- Vol. 54 No. 1 M-FET特集
- Vol. 53 No. 4 新製品·新技術特集
- Vol. 53 No. 3 交通·輸送特集
- Vol. 53 No. 2 船舶·海洋特集
- Vol. 53 No. 1 機械·設備システム特集
- Vol. 52 No. 4 新製品·新技術特集
- Vol. 52 No. 3 工作機械特集
- Vol. 52 No. 2 三菱日立パワーシステムズ特集
- Vol. 52 No. 1 新製品·新技術特集
- Vol. 51 No. 4 航空宇宙特集
- Vol. 51 No. 3 機械·設備システム特集
- Vol. 51 No. 2 冷熱特集
- Vol. 51 No. 1 新製品·新技術特集
- Vol. 50 No. 4 都市交通を支える技術特集
- Vol. 50 No. 3 発電技術特集
- Vol. 50 No. 2 船舶·海洋特集
- Vol. 50 No. 1 新製品·新技術特集
- Vol. 49 No. 4 三菱重工の総合力特集
- Vol. 49 No. 3 工作機械特集
- Vol. 49 No. 2 交通·物流/自動車特集
- Vol. 49 No. 1 新製品·新技術特集
- Vol. 48 No. 4 航空宇宙特集
- Vol. 48 No. 3 発電技術特集
- Vol. 48 No. 2 冷熱特集
- Vol. 48 No. 1 新製品·新技術特集
- Vol. 47 No. 4 自動車関連技術特集
- Vol. 47 No. 3 船舶·海洋特集
- Vol. 47 No. 2 交通·物流特集
- Vol. 47 No. 1 低炭素社会特集
- Vol. 46 No. 4 原子力特集
- Vol. 46 No. 3 ものづくりを支える機械·技術特集
- Vol. 46 No. 2 発電技術特集
- Vol. 46 No. 1 新製品·新技術/サービス特集
- Vol. 45 No. 4 航空宇宙特集
- Vol. 45 No. 3 自動車関連技術小特集/工作機械小特集
- Vol. 45 No. 2 冷熱特集
- Vol. 45 No. 1 地球温暖化対策特集
- Vol. 44 No. 4 発電技術特集
- Vol. 44 No. 3 船舶·海洋特集
- Vol. 44 No. 2 陸上輸送·物流/循環型社会を構築する環境技術小特集
- Vol. 44 No. 1 新製品·新技術特集
- Vol. 43 No. 4 原子力特集
- Vol. 43 No. 3 紙印刷機械·自動車関連技術小特集
- Vol. 43 No. 2 エアコン特集
- Vol. 43 No. 1 新製品·新技術特集
- Vol. 42 No. 5 航空宇宙特集
- Vol. 42 No. 4 地球環境特集
- Vol. 42 No. 3 発電技術特集
- Vol. 42 No. 2 モノ作りを支える機械と技術特集
- Vol. 42 No. 1 新製品·新技術特集
- Vol. 41 No. 6 船舶·海洋特集
- Vol. 41 No. 5 未来を拓く発電技術特集
- Vol. 41 No. 4 未来を守る地球環境特集
- Vol. 41 No. 3 風水力機械特集
- Vol. 41 No. 2 快適な空間を提供するエアコン特集
- Vol. 41 No. 1 豊かな社会に貢献する新製品·新技術特集
- Vol. 40 No. 6 先進技術特集
- Vol. 40 No. 5 エレクトロニクス製品特集
- Vol. 40 No. 4 未来を拓く発電技術特集
- Vol. 40 No. 3 人に優しい陸上交通システム特集
- Vol. 40 No. 2 お客様の安心を支えるサービス特集
- Vol. 40 No. 1 三菱重工の昨日·今日·あした
- 知的財産
- 研究公募
- Yokohama Hardtech Hub
- 原子力事業
- エンジニアリング事業