




SHARE


Vol. 60 No. 1 (2023) 新製品·新技術特集
技術論文
|
||||||||||||
製品・技術
- 製品情報
- 技術情報
- 01 今日を支える CARBON NEUTRAL WORLD
- 02 未来を創る INNOVATION
- 03 想いを叶える MHI CORE TECHNOLOGIES
- 04 技術を高める R&D CENTER, FACILITY
- 三菱重工技報
- Vol. 61 No. 2 プラント·インフラドメイン特集
- Vol. 61 No. 1 新製品·新技術特集
- Vol. 60 No. 4 サービス技術特集
- Vol. 60 No. 3 エナジードメイン特集
- Vol. 60 No. 2 物流·冷熱·ドライブシステムドメイン特集
- Vol. 60 No. 1 新製品·新技術特集
- MHI FUTURE STREAMが描き出す中長期展望と新たな価値の創造にむけた当社グループの挑戦
- CCUSバリューチェーン構築に貢献するCO2コンプレッサ
- 熱供給セクターの脱炭素化に貢献する大容量·高温ヒートポンプ
- 倉庫の保管効率と入出庫速度向上を両立させる新型自動運転フォークリフトの開発
- プラント支持鉄骨の自動最適設計システム"M-FRAME"の開発
- 新聞輪転機 自動運転機能"Auto-Pilot Printing(APP)"の開発
- 安定燃焼と高負荷変化率を実現する次世代ガスタービン制御
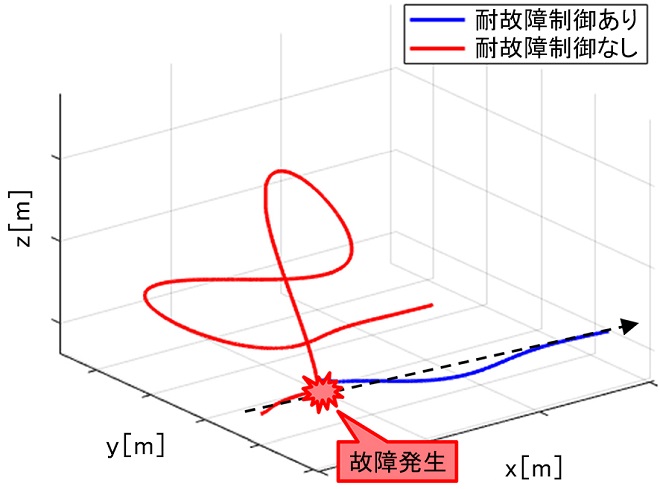
- アクチュエータの冗長性を利用した無人ビークルの耐故障制御機能の開発
- AM造形を活用した通風口用EMPシールドの開発
- 金属Additive Manufacturing技術を活用したコンパクト·高性能熱交換器の開発
- 砂型積層造形を活用した最適鋳型構造設計技術
- RO膜(逆浸透膜)を長寿命化する脱塩性能回復剤の開発
- マテリアルズ·インフォマティクスによる材料強度特性の予測
- 風災害レジリエンス向上に貢献する台風被害シミュレーション技術
- 薄型センサによる圧縮機翼端ケーシング流れ角計測技術の開発
- ガスタービン燃焼器内火炎の3次元形状可視化技術
- 感圧塗料を用いた回転機械ラビリンスシール励振力の可視化
- 3Dデジタル記録化を実現する 写真投影による簡易3D検査記録システム
- Vol. 59 No. 4 カーボンニュートラル特集
- Vol. 59 No. 3 デジタルイノベーション特集
- Vol. 59 No. 2 プラント·インフラ特集
- Vol. 59 No. 1 新製品·新技術特集
- Vol. 58 No. 4 航空宇宙特集
- Vol. 58 No. 3 三菱パワー特集
- Vol. 58 No. 2 物流·冷熱·ドライブシステムドメイン特集
- Vol. 58 No. 1 新製品·新技術特集
- Vol. 57 No. 4 原子力特集
- Vol. 57 No. 3 工作機械特集
- Vol. 57 No. 2 インダストリー&社会基盤特集
- Vol. 57 No. 1 新製品·新技術特集
- Vol. 56 No. 4 冷熱特集
- Vol. 56 No. 3 三菱日立パワーシステムズ特集
- Vol. 56 No. 2 M-FET特集
- Vol. 56 No. 1 新製品·新技術特集
- Vol. 55 No. 4 パワードメイン 新事業特集
- Vol. 55 No. 3 インダストリー&社会基盤ドメイン特集
- Vol. 55 No. 2 新技術特集
- Vol. 55 No. 1 環境特集
- Vol. 54 No. 4 航空宇宙特集
- Vol. 54 No. 3 三菱日立パワーシステムズ特集
- Vol. 54 No. 2 冷熱特集
- Vol. 54 No. 1 M-FET特集
- Vol. 53 No. 4 新製品·新技術特集
- Vol. 53 No. 3 交通·輸送特集
- Vol. 53 No. 2 船舶·海洋特集
- Vol. 53 No. 1 機械·設備システム特集
- Vol. 52 No. 4 新製品·新技術特集
- Vol. 52 No. 3 工作機械特集
- Vol. 52 No. 2 三菱日立パワーシステムズ特集
- Vol. 52 No. 1 新製品·新技術特集
- Vol. 51 No. 4 航空宇宙特集
- Vol. 51 No. 3 機械·設備システム特集
- Vol. 51 No. 2 冷熱特集
- Vol. 51 No. 1 新製品·新技術特集
- Vol. 50 No. 4 都市交通を支える技術特集
- Vol. 50 No. 3 発電技術特集
- Vol. 50 No. 2 船舶·海洋特集
- Vol. 50 No. 1 新製品·新技術特集
- Vol. 49 No. 4 三菱重工の総合力特集
- Vol. 49 No. 3 工作機械特集
- Vol. 49 No. 2 交通·物流/自動車特集
- Vol. 49 No. 1 新製品·新技術特集
- Vol. 48 No. 4 航空宇宙特集
- Vol. 48 No. 3 発電技術特集
- Vol. 48 No. 2 冷熱特集
- Vol. 48 No. 1 新製品·新技術特集
- Vol. 47 No. 4 自動車関連技術特集
- Vol. 47 No. 3 船舶·海洋特集
- Vol. 47 No. 2 交通·物流特集
- Vol. 47 No. 1 低炭素社会特集
- Vol. 46 No. 4 原子力特集
- Vol. 46 No. 3 ものづくりを支える機械·技術特集
- Vol. 46 No. 2 発電技術特集
- Vol. 46 No. 1 新製品·新技術/サービス特集
- Vol. 45 No. 4 航空宇宙特集
- Vol. 45 No. 3 自動車関連技術小特集/工作機械小特集
- Vol. 45 No. 2 冷熱特集
- Vol. 45 No. 1 地球温暖化対策特集
- Vol. 44 No. 4 発電技術特集
- Vol. 44 No. 3 船舶·海洋特集
- Vol. 44 No. 2 陸上輸送·物流/循環型社会を構築する環境技術小特集
- Vol. 44 No. 1 新製品·新技術特集
- Vol. 43 No. 4 原子力特集
- Vol. 43 No. 3 紙印刷機械·自動車関連技術小特集
- Vol. 43 No. 2 エアコン特集
- Vol. 43 No. 1 新製品·新技術特集
- Vol. 42 No. 5 航空宇宙特集
- Vol. 42 No. 4 地球環境特集
- Vol. 42 No. 3 発電技術特集
- Vol. 42 No. 2 モノ作りを支える機械と技術特集
- Vol. 42 No. 1 新製品·新技術特集
- Vol. 41 No. 6 船舶·海洋特集
- Vol. 41 No. 5 未来を拓く発電技術特集
- Vol. 41 No. 4 未来を守る地球環境特集
- Vol. 41 No. 3 風水力機械特集
- Vol. 41 No. 2 快適な空間を提供するエアコン特集
- Vol. 41 No. 1 豊かな社会に貢献する新製品·新技術特集
- Vol. 40 No. 6 先進技術特集
- Vol. 40 No. 5 エレクトロニクス製品特集
- Vol. 40 No. 4 未来を拓く発電技術特集
- Vol. 40 No. 3 人に優しい陸上交通システム特集
- Vol. 40 No. 2 お客様の安心を支えるサービス特集
- Vol. 40 No. 1 三菱重工の昨日·今日·あした
- 知的財産
- 研究公募
- Yokohama Hardtech Hub
- 原子力事業
- エンジニアリング事業