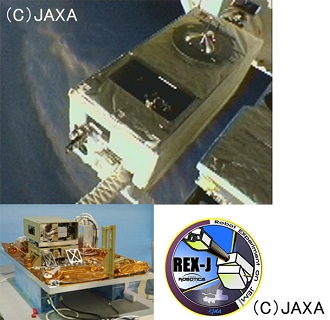
"REX-J" (Robot Experiment on JEM), which was developed from 2008, was launched in
July 2012 and carried out the world's first space demonstration of robotic spatial mobility
technology over a course of about one year using 4 tethers (synthetic fiber strings) and an
extendable robot arm on the Exposed Facility of the Japanese Experiment Module(JEM) "KIBO"
in International Space Station (ISS), and achieved a great success. This report summarizes
REX-J's development-to-operation topics including the mission outline and requirements, robotic
development and achievements, and in-orbit experiments/results.